
Управление ардуино по вай фай. Возможности подключения Wi-Fi модуля esp8266 к arduino
Итак будем управлять двумя реверсивными (вращение в обе стороны) двигателями: основным и рулевым. Питать их будем от аккумулятора 3,7 В, но можно и до 12 В в принципе подавать, если согласовать питание контроллера или организовать его отдельным аккумулятором.
В силовой части используем простейший миниатюрный драйвер шагового двигателя l9110s или же можно использовать сборку на L293\8 или любой не менее мощный, который вы найдёте. В общем я всё нарисовал на картинке.
Приобрести комплектующие для проекта можно на алиэкспресс:
WiFi контроллер использован мой любимый NodeMCU 0.9 ESP8266 , но можно использовать и меньший размером WeMos D1 mini.
Аккумулятор можно зарядить через микро-USB, после чего он питает драйвер двигателей напрямую и WiFi-контроллер через повышающий преобразователь до 5 В .
Код программы:
#include
const char* ssid = "имя вашей сети вайфай";
const char* password = "пароль вашей сети";
int up = 2; //номера дискретных выходов
int down = 14;
int left = 4;
int right = 12;
// Create an instance of the server
// specify the port to listen on as an argument
WiFiServer server(80);
void setup() {
Serial.begin(9600);
delay(10);
//подготовка выходов
pinMode(up, OUTPUT);
digitalWrite(up, 0);
pinMode(down, OUTPUT);
digitalWrite(down, 0);
pinMode(left, OUTPUT);
digitalWrite(left, 0);
pinMode(right, OUTPUT);
digitalWrite(right, 0);
// Connect to WiFi network
Serial.println();
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
While (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
//Запуск сервера
server.begin();
Serial.println("Server started");
//выводим IP адрес в монитор порта
Serial.println(WiFi.localIP());
}
void loop() {
//проверяем подключился ли клиент
WiFiClient client = server.available();
if (!client) {
return;
}
//Ожидаем пока клиент не пришлет какие-нибудь данные
Serial.println("new client");
while(!client.available()){
delay(1);
}
//Чтение первой строки запроса
String req = client.readStringUntil("\r");
Serial.println(req);
client.flush();
//обработка команды
if (req.indexOf("/gpio/up") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
}
else if (req.indexOf("/gpio/down") != -1){
digitalWrite(up, 0);
digitalWrite(down, 1);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
}
else if (req.indexOf("/gpio/left") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
digitalWrite(left, 1);
digitalWrite(right, 0);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 0);
}
else if (req.indexOf("/gpio/right") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 1);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 0);
}
else {
Serial.println("invalid request");
}
Client.flush();
// подготовка к ответу
String s = "HTTP/1.1 200 OK\r\nContent-Type: text/html\r\n\r\n\r\n\r\n ";
S += "
UP
";
s += "
LEFT ";
s += "RIGHT
";
s += "
DOWN";
s += "
// Send the response to the client
client.print(s);
delay(1);
Serial.println("Client disonnected");
} Программа написана в Arduino IDE. Как настроить Arduino IDE для работы с контроллером NodeMCU 0.9 ESP8266 посмотрите по ссылке. После загрузки программы в контроллер, монитором порта можно прочитать IP-адрес, который плата получит после соединения с вашим WiFi-роутером. В браузере компьютера необходимо в адресной строке прописать этот адрес и перейти на страницу, которую сгенерирует программа контроллера. Она будет выглядеть следующим образом:
DOWN
При нажатии на ссылку UP, машинка проедет вперед в течении 1сек и остановится. При нажатии на DOWN, машинка 1 секунду будет ехать назад. LEFT - двигатель поворота повернёт колёса влево и машинка проедет 1 сек влево. То же самое и вправо при нажатии на RIGHT.
Вся эта система будет работать только при настроенной WiFi-точке доступа (WiFi-роутере), но в будущем мне интересно поиграться с контроллером NodeMCU 0.9 ESP8266 , который сам будет организовывать точку доступа и выполнять функцию WEB-сервера, тоесть при заходе на его айпи из браузера, будем видеть web-страничку с элементами управления. Так же интересно организовать передачу данных с одного такого контроллера в другой посредством их автономной WiFi-сети.
Микросхема ESP8266 – один из самых популярных инструментов для организации беспроводной связи в проектах умного дома. С помощью беспроводного контроллера можно организовывать связь по интерфейсу WiFi, обеспечивая проектам Arduino выход в интернет и возможность дистанционного управления и сбора данных. На основе ESP8266 созданы такие популярные платы как WeMos и NodeMcu, а также огромное количество самодельных проектов. В этой статье, мы узнаем, что из себя представляет ESP82266, какие бывают ее разновидности, как работать с ESP8266 в среде Arduino IDE.
ESP8266 – микроконтроллер с интерфейсом WiFi, который имеет возможность исполнять программы из флеш-памяти. Устройство было выпущено в 2014 году китайской фирмой Espressif и практически сразу же стало популярным.
Контроллер недорогой, обладает небольшим количеством внешних элементов и имеет следующие технические параметры:
- Поддерживает Wi-Fi протоколы 802.11 b/g/n с WEP, WPA, WPA2;
- Обладает 14 портами ввода и вывода, SPI, I2C, UART, 10-бит АЦП;
- Поддерживает внешнюю память до 16 МБ;
- Необходимое питание от 2,2 до 3,6 В, потребляемый ток до 300 мА в зависимости от выбранного режима.
Важной особенностью является отсутствие пользовательской энергонезависимой памяти на кристалле. Программа выполняется от внешней SPI ПЗУ при помощи динамической загрузки необходимых элементов программы. Доступ к внутренней периферии можно получить не из документации, а из API набора библиотек. Производителем указывается приблизительное количество ОЗУ – 50 кБ.
Особенности платы ESP8266:
- Удобное подключение к компьютеру – через USB кабель, питание от него же;
- Наличие встроенного преобразователя напряжения 3,3В;
- Наличие 4 Мб флеш-памяти;
- Встроенные кнопки для перезагрузки и перепрошивки;
- Все порты выведены на плату на две гребенки с шагом 2,5 мм.
Сферы применения модуля ESP8266
- Автоматизация;
- Различные системы для умного дома: Беспроводное управление, беспроводные розетки, управление температурой, дополнение к сигнализационным системам;
- Мобильная электроника;
- ID метки;
- Детские игрушки;
- Mesh-сети.
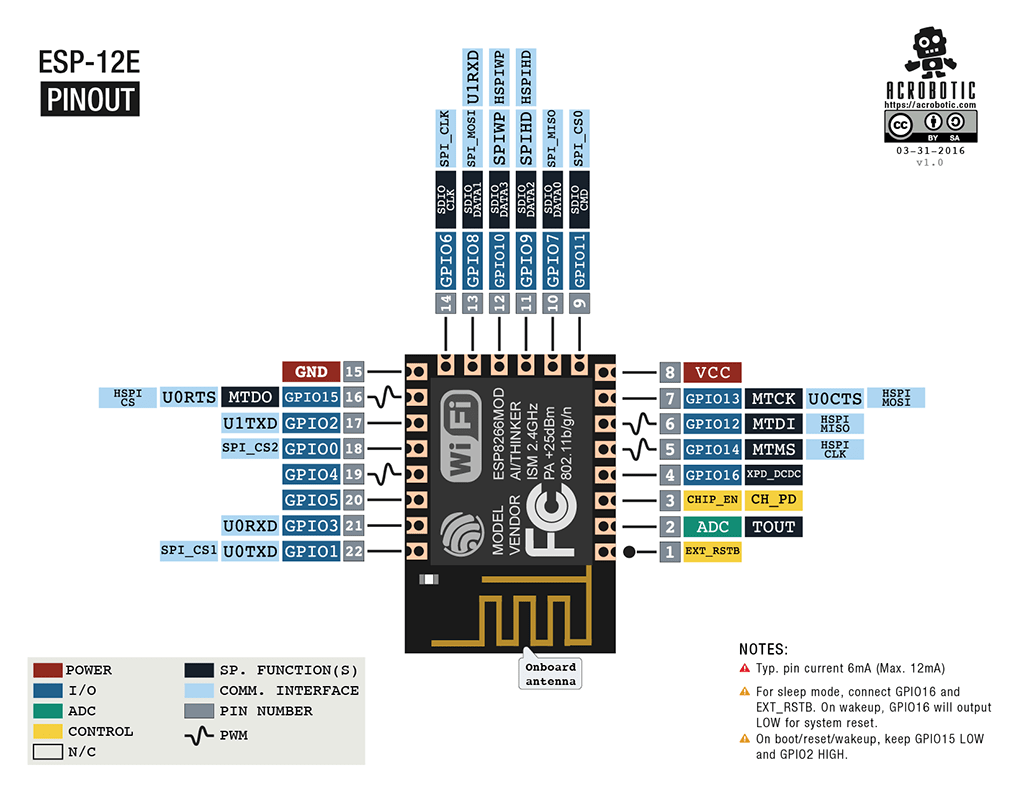
Распиновка esp8266
Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые из них. Наиболее популярным вариантом является ESP 01.
Исполнение программы требуется задавать состоянием портов GPIO0, GPIO2 и GPIO15, когда заканчивается подача питания. Можно выделить 2 важных режима – когда код исполняется из UART (GPIO0 = 0, GPIO2 = 1 и GPIO15 = 0) для перепрошивки флеш-карты и когда исполняется из внешней ПЗУ (GPIO0 = 1, GPIO2 = 1 и GPIO15 = 0) в штатном режиме.
Распиновка для ESP01 изображена на картинке.


Описание контактов:
- 1 – земля, 8 – питание. По документации напряжение подается до 3,6 В – это важно учесть при работе с Ардуино, на которую обычно подают 5 В.
- 6 – RST, нужна для перезагрузки микроконтроллера при подаче на него низкого логического уровня.
- 4 – CP_PD, также используется для перевода устройства в энергосберегающий режим.
- 7 и 0 – RXD0 и TXD0, это аппаратный UART, необходимый для перепрошивки модуля.
- 2 – TXD0, к этому контакту подключается светодиод, который загорается при низком логическом уровне на GPIO1 и при передаче данных по UART.
- 5 – GPIO0, порт ввода и вывода, также позволяет перевести устройство в режим программирования (при подключении порта к низкому логическому уровню и подачи напряжения) .
- 3 – GPIO2, порт ввода и вывода.
Распиновка ESP-12
Основные отличия Ардуино от ESP8266
- ESP8266 имеет больший объем флеш-памяти, при этом у ESP8266 отсутствует энергонезависимая память;
- Процессор ESP8266 быстрее, чем у Ардуино;
- Наличие Wi-Fi у ESP8266;
- ESP8266 потребляеn больше тока, чем для Ардуино;
Программирование ESP8266 в Arduino IDE
Программный комплект разработчика esp8266 включает в себя:
- Компилятор из пакета GNU Compiler Collection.
- Библиотеки, стеки протоколов WiFi, TCP/IP.
- Средство загрузки информации в программу контроллера.
- Операционная IDE.
Изначально модули ESP8266 поставляются с прошивкой от фирмы-изготовителя. С ее помощью можно управлять модулем с внешнего микроконтроллера, реализовывать работу с Wi-Fi как с модемом. Также существует множество других готовых прошивок. Некоторые из них позволяют настраивать работу модуля при помощи WEB-интерфейса.
Можно программировать из среды Arduino IDE. При ее помощи можно легко писать скетчи и загружать их в ESP8266, прошивать ESP8266, при этом не требуется сама плата Ардуино. Arduino IDE поддерживает все виды модулей ESP8266.
В настоящий момент для ESP8266 можно реализовать следующие функции:
- Основные функции языка Wiring. Управлять портами GPIO можно точно так же, как и пинами на плате Ардуино: pinMode, digitalRead, digitalWrite, analogWrite. Команда analogRead(А0) позволяет считать значения АЦП. При помощи команды analogWrite (pin, value) можно подключить ШИМ на нужном выходе GPIO. При value=0 ШИМ отключается, максимальное значение достигает константы, равной 1023.С помощью функций attachInterrupt, detachInterrupt можно выполнять прерывание на любом порте GPIO, кроме 16.
- Тайминг и delay. Используя команды millis и micros можно вернуть мс и мкс, которые прошли с момента старта. Delay позволяет приостановить исполнение программы на нужное время. Также функция delay(…) позволяет поддерживать нормальную работу Wi-Fi, если в скетче присутствуют большие элементы, которые выполняются более 50 мс. Yield() – аналог функции delay(0).
- Serial и Serial1 (UART0 и UART1). Работа Serial на ESP8266 аналогична работе на ардуино. Запись и чтение данных блокируют исполнение кода, если FIFO на 128 байт и программный буфер на 256 байт заполнены. Объект Serial пользуется аппаратным UART0, для него можно задать пины GPIO15 (TX) и GPIO13 (RX) вместо GPIO1(TX) и GPIO3(RX). Для этого после функции Serial.begin(); нужно вызвать Serial.swap();. Аналогично Serial1 использует UART1, который работает на передачу. Необходимый пин для этого GPIO2.
- Макрос PROGMEM. Его работа аналогична работе в Ардуино. Позволяет перемещать данные read only и строковые постоянные во flash-память. При этом в ESP8266 не сохраняются одинаковые константы, что приводит к дополнительной трате флеш-памяти.
- I2C. Перед началом работы с шиной I2C выбираются шины с помощью функции Wire.pins(int sda, int scl).
- SPI, OneWire – поддерживаются полностью.
Использование esp8266 для связи Ардуино по WiFi
Перед подключением к Ардуино важно помнить, что у ESP8266 напряжение питания не может быть выше 3,6, в то время как на пате Ардуино напряжение равно 5 В. Соединять 2 микроконтроллера нужно с помощью резистивных делителей. Перед подключением модуля нужно ознакомиться с распиновкой выбранного ESP8266. Схема подключения для ESP8266-01 представлена на рисунке.
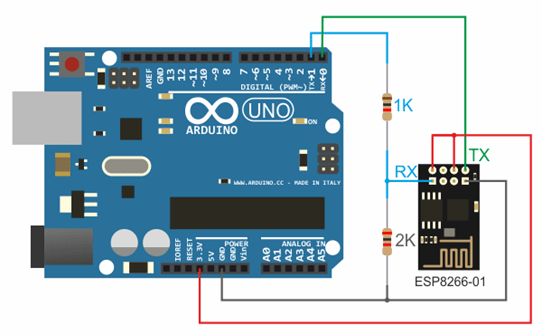
3,3 В с Ардуино – на Vcc&CH_PD на модуле ESP8266, Земля с Ардуино – к земле с ESP8266, 0 – TX, 1 – RX.
Для поддержки стабильной работы ESP8266 необходим источник постоянного напряжения на 3,3 В и максимальный ток 250 мА. Если питание происходит от конвертера USB-TTL, могут происходить неполадки и сбои в работе.
Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного шилда. Имеется несколько особенностей:
- mode(m) – для выбора одного из трех режимов: клиент, точка доступа или оба режима единовременно.
- softAP(ssid) – нужен для создания открытой точки доступа.
- softAP(ssid, password) – создает точку доступа с паролем, который должен состоять не менее чем из 8 знаков.
- WiFi.macAddress(mac) и WiFi.softAPmacAddress(mac)– определяет МАС адрес.
- WiFi.localIP() и WiFi.softAPIP() – определение IP адреса.
- printDiag(Serial); – позволят узнать данные о диагностике.
- WiFiUDP – поддержка передачи и приема multicast пакета в режиме клиента.
Работа выполняется по следующему алгоритму:
- Подключение USB-TTL к USB и к ESP.
- Запуск Arduino IDE.
- Выбрать в меню инструменты нужный порт, плату, частоту и размер flash-памяти.
- Файл - Примеры - ESP8266WiFi - WiFiWebServer.
- Записать в скетче SSID и пароль сети Wi-Fi.
- Начать компиляцию и загрузку кода.
- Дождаться окончания процесса прошивки, отсоединить GPIO0 от земли.
- Поставить скорость 115200.
- Произойдет подключение, будет записан адрес IP.
- Открыть браузер, ввести в адресной строке номер IP/gpio/1
- Посмотреть монитор порта, если к выходу GPIO2 подключен светодиод, он должен загореться.
NodeMCU на базе esp8266
 NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
Большим преимуществом платы является ее малое энергопотребление. Нередко их используют в схемах с автономным питанием. На плате расположены всего 11 портов общего назначения, из них некоторые имеют специальные функции:
- D1 и D2 – для интерфейса I2C/ TWI;
- D5-D8- для интерфейса SPI;
- D9, D10 – для UART;
- D1-D10 – могут работать как ШИМ.
Платформа имеет современное API для аппаратного ввода и вывода. Это позволяет сократить количество действий во время работы с оборудованием и при его настройке. С помощью прошивки NodeMCU можно задействовать весь рабочий потенциал для быстрой разработки устройства.
WeMos на базе esp8266
 WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
Для работы с модулем нужно установить драйвер CH340 и настроить Ардуино IDE под ESP8266. Для этого нужно в меню настройки в строке «дополнительная ссылка для менеджера плат» добавить адрес http://arduino.esp8266.com/stable/package_esp8266com_index.json.
После этого требуется найти пакет esp8266 by ESP8266 и установить его. Затем нужно выбрать в меню инструменты микроконтроллер Wemos D1 R2 и записать нужный скетч.
Выводы по ESP8266
С помощью плат на основе микросхемы ESP8266 вы можете добавить в свои проекты возможности “большого интернета”, сделав их гораздо более интеллектуальными. Дистанционное управление, сбор и анализ данных на сервере, обработка голоса и работа с изображением – все это становится доступным, когда мы подключаем наш проект по WiFi к интернету. В следующих статьях мы подробно рассмотрим то, как можно программировать устройства на базе esp8266, а также уделим внимание таким популярным платам как WeMos и NodeMcu.
В этой статье информация о том как собрать свой танк, оснащенный Web Камерой и управляемый посредством Wifi роутера.
Необходимые материалы:
- Web Camera
- Роутер TP-Link TL-MR3020
- Сервоприводы SG90 - 2шт
- Camera Platform Anti-Vibration
- Аккумулятор 7.2V 5000mah
- Аккумулятор 5V 2000mah
- Nano 3.0 Atmel ATmega328
- L298N motor driver
- Провода, термотрубки, USB хаб, диоды и другое.
- Платформа на ваш вкус, я выбрал DD1-1
Сборка нашего монстра
Настройка Роутера MR3020.
Первым делом начнем с роутера. Я долго думал что выбрать OR-WRT или CyberWRT. OR-WRT гибок в настройках, но все редактирование и внесения своих настроек осуществляется через терминал с помощи программы Putty. А так как Я боялся на тот момет работать через терминал, Я выбрал где есть графический интерфейс это CyberWRT, плюс возможно подключение через USB порт.
Для того что бы изменить прошивку нашего роутера, нужно скачать прошивку CyberWrt MR3020.
Как мы скачали, делаем следующее:
1) Включить роутер и подождать загрузки.
2) Зайти и залогиниться на 192.168.0.254 (по умолчанию admin\admin)
3) Найти в меню слева System Tools, там пункт System Upgrade и залить прошивку через веб-форму
4) Дождаться перезагрузки (порядка 4х минут)
Роутер готов к настройке.

Можно выбрать один из режимов:
«Точка доступа» и «Клиент Wi-Fi сети». Для настройки режима Клиента:
- выберите режим «Клиент Wi-Fi сети»
- IP адрес Вашего устройства (по этому адресу будет доступно Ваше устройство. Постарайтесь выбрать незанятый IP. Например: 192.168.1.100)
- Маска подсети (255.255.255.0)
- Шлюз (например, IP Вашего домашнего роутера или шлюза - 192.168.1.1)
- Тип шифрования (тип шифрования, используемый в Вашей домашней сети)
- Пароль (пароль, для доступа к Вашей домашней сети)
Если сделали все правильно, то у вас пойдет RSS строка в нижней части экрана.
Когда все заработала, у вас появятся раздел модули, там вы находите модуль "РОБОТ". Устанавливайте. Готово.
Подключение L298N, Arduino Nano, MR3020, Камера и другое
На картинке все наглядно показано, но на всякий случай напишу.

Вывод Arduino DIGITAL 4 - к IN1 пину модуля.
Вывод Arduino DIGITAL 5 - к IN2 пину модуля.
Вывод Arduino DIGITAL 6 - к IN3 пину модуля.
Вывод Arduino DIGITAL 7 - к IN4 пину модуля.
Вывод Arduino GND - к GND клеме модуля.
GND клема модуля - Минус аккумулятора.
7.2V клема модуля - Плюс аккумулятора.
RM клема модуля - Правый моторчик.
LM клема модуля - Левый моторчик.
USB порт Arduino - Подключаем к USB хаб
Web Камера - Подключаем к USB хаб
USB хаб - Подключаем к USB роутера
Питание так скажем логистики, осуществляется вторым аккумулятором. Емкость 2000 mA/h 5v, дабы не спалить роутер. Да и с двумя аккумуляторами робот стабильней работает. Так вот, его мы подключаем просто в разъем микро USB. Через USB хаб который подключен к роутету питанию уже получает и камера и наша ардуинка.

Скетч для Arduino Nano
Вам необходима скачать библиотеку CyberLib , она предназначена только для Atmega 328.
/*
Версия 1.5 WIFI Tanka на DD1-1
Реализовано:
1) Движение камеры по X и Y
2) Гудок
3) Фары
4) Звук при включении
*/
#include
Внесение изменений в роутер
Для того что бы управлять камерами были внесены изменения в библиотеку роутера. Вам нужно будет скачать измененный код и заменить исходные файлы ним.
В этой статье вы узнаете, как создать систему, которая может включать и выключать нагрузки постоянного тока с помощью мобильного приложения. Вы также узнаете, как выполнить эту задачу мгновенно или по таймерам, заранее установленным для включения и выключения нагрузок.
Обзор проекта
Вы можете реализовать эту систему там, где вам нужно включать нагрузку постоянного тока на определенное время. В этом вам поможет наше Android приложение, не требуя аппаратного интерфейса, клавиатуры и LCD дисплея.
Комплектующие
Сборка макетной платы ESP8266
ESP8266 - недорогой SoC-чип со встроенным микроконтроллером и полным стеком протоколов TCP/IP, что означает, что он может напрямую обращаться к вашей Wi-Fi сети.
Поскольку у этого чипа есть свой микроконтроллер, вы можете поместить в него код своего приложения или можете использовать модуль просто как Wi-Fi приемопередатчик, что мы и собираемся сделать в данном проекте. Более эффективно было бы использовать этот модуль и как приемопередатчик, и как контроллер, но в целях обучения мы будем взаимодействовать с модулем, используя Arduino.
Чип ESP8266 поставляется в разных модулях. Мы будем использовать модуль ESP-01. Конечно, вы можете использовать любой другой модуль.
Во-первых, вы должны знать, что модуль работает с напряжением 3,3 В, и напряжение высокого логического уровня от Arduino должно быть таким же, чтобы не повредить наш модуль. Для этого требуется преобразователь уровня напряжения между платой Arduino (которая работает на 5 В) и модулем. Хорошей новостью является то, что в преобразователе будет нуждаться только вывод для передачи на Arduino, поскольку приемный вывод обычно распознает логические сигналы с напряжением 3,3 В от ESP8266.
Одним из простейших способов выполнения этого преобразования является схема от Sparkfun. Вы можете заказать готовый модуль .
Преобразователь уровня 5В → 3,3В
На рисунке ниже показана распиновка нашего модуля на ESP8266:
| Вывод | Назначение |
|---|---|
| UTXD | Передача данных через UART |
| URXD | Прием данных через UART. Выход, к которому он подключается, должен быть 3,3 В. |
| CH_PD | Выключение: низкий уровень на входе выключает чип, высокий уровень на входе включает его; для нормальной работы модуля необходимо подтянуть его к линии питания. |
| GPIO0 | При загрузке: должен быть высокий уровень, чтобы входить в нормальный режим загрузки; низкий уровень вводит в специальные режимы загрузки. |
| GPIO2 | При загрузке: низкий уровень заставляет загрузчик войти в режим загрузки флеш-памяти; высокий уровень вызывает нормальный режим загрузки. |
| RST | Сброс; активный уровень - низкий. |
| GND | Земля. |
| VCC | Питание/3,3В. |
Я использовал LM317, настраиваемый линейный регулятор напряжения с выходным током до 1,5 А, для обеспечения модуля подходящим источником питания 3,3 В.
Примечание: Не используйте вывод 3,3 В от Arduino, так как стабилизатор напряжения 3,3 В на плате Arduino не может обеспечить необходимую для модуля величину тока, особенно при пиковом потреблении энергии во время передачи.
Я использовал BS170 (вместо BSS138) для преобразователя логических уровней; оба работают хорошо.
Теперь вы можете подключить свой модуль к компьютеру, используя USB-TTL преобразователь, и испытать его.
Сборка макетной платы реле
Для управления реле я использовал биполярный NPN транзистор BC337 с резистором 1 кОм на базе. Для защиты от обратного напряжения катушки я использовал диод 1n4007.
Нормально замкнутый (NC) контакт реле я решил подключить к земле.
Код Arduino
Теперь мы сталкиваемся с проблемой. ESP8266 использует UART в качестве интерфейса для AT-команд, а Arduino Uno (которая использует Atmega328) имеет только один порт UART. Этот порт уже подключен к мосту USB-TTL, а также к выводам 0 и 1.
В качестве решения вы можете использовать эмулятор для UART порта на другом цифровом выводе Arduino с помощью библиотек AltSoftSerial или SoftwareSerial. Это позволит вам по-прежнему иметь аппаратный порт UART для отладки и печати сообщений в консоли, а программный порт - для связи с модулем.
Многие люди (включая меня) сообщают о проблемах с программным последовательным портом при высоких скоростях передачи - как на тех, что мы будем использовать с esp8266, 115200 бит/с. Я могу сказать, что у вас 50% принятых от модуля данных будет повреждено, если вы используете программный UART, а из переданных от Arduino к модулю данных почти 100% будет корректно. Я получил эти результаты после отслеживания сигналов на линиях RX и TX.
В качестве решения я добавил в код несколько директив define , чтобы облегчить вам выбор между аппаратным и программным UART портами. Имейте в виду, что вы не можете использовать один и тот же порт для отладки и общения с модулем, поэтому вам нужно выбирать между ними.
//раскомментируйте Serial.*** , если хотите для связи с ESP использовать аппаратный последовательный порт (выводы 0,1) //раскомментируйте esp8266.*** , если хотите для связи с ESP использовать программный последовательный порт (выводы 2,3) #define esp8266_Available() Serial.available() //esp8266.available() #define esp8266_Find(ARG) Serial.find(ARG) //esp8266.find(ARG) #define esp8266_Read() Serial.read() //esp8266.read() #define esp8266_Write(ARG1,ARG2) Serial.write(ARG1,ARG2) //esp8266.write(ARG1,ARG2) #define esp8266_Print(ARG) Serial.print(ARG) //esp8266.print(ARG)
В исходнике вы найдете часть кода, которая устанавливает модуля с вашим роутером:
SendCommand("AT+RST\r\n", 2000, DEBUG); // перезапустить модуль sendCommand("AT+CWMODE=1\r\n", 1000, DEBUG); // настроить как точку доступа sendCommand("AT+CWJAP=\"tur\",\"341983#tur\"\r\n", 3000, DEBUG); //**** ИЗМЕНИТЬ SSID и ПАРОЛЬ В СООТВЕТСТВИИ С ВАШЕЙ СЕТЬЮ ******// delay(10000); sendCommand("AT+CIFSR\r\n", 1000, DEBUG); // получить ip адрес sendCommand("AT+CIPMUX=1\r\n", 1000, DEBUG); // настроить для нескольких соединений sendCommand("AT+CIPSERVER=1,1337\r\n", 1000, DEBUG); // включить сервер на порту 1337
Цикл скетча ожидает команды, которые должны прийти через Wi-Fi соединение. В настоящее время поддерживаются следующие команды:
- ‘con’ для получения состояния выводов, высокий или низкий логический уровень;
- ‘on=’ включить соответствующий вывод;
- ‘of=’ выключить соответствующий вывод;
- ‘Tm=n/fS’ установить таймер включения (n) или выключения (f) соответствующего вывода.
Все команды имеют отклик подтверждения.
Примечания:
- некоторые части скетча основаны на ;
- если вы используете модули со старым SDK, у вас могут быть такие же ошибки, как и у меня. Единственным решением в этом случае является обновление вашей прошивки до последней версии. Посмотрите , для получения помощи в обновлении прошивки модуля на ESP8266. Я обновил прошивку с версии 1.3 до 1.5.4.
Полный код программы:
#include
Android приложение
Чтобы управлять всеми выше перечисленными аппаратными компонентами, мы будем использовать простое приложение для Android. Это приложение позволит нам включать или выключать выход напрямую или через определенный период времени.
Примечание: Приложение требует Android 4.0 (IceCreamSandwich) или выше.
- Прежде всего, вы должны знать IP адрес своего модуля. Если вы использовали программный последовательный порт, IP адрес будет напечатан в консоли. Если вы использовали аппаратный последовательный порт, то вы должны использовать кабель для отслеживания данных на линиях RX и TX, чтобы увидеть IP адрес. Вам также нужно знать номер порта, который был указан в скетче для Arduino. После этого нажмите "connect", чтобы получить состояние всех трех выходов. Вам нужно убедиться, что ваш Wi-Fi роутер включен, и вы подключены к локальной сети.
- Теперь нажмите на любой переключатель, который вы хотите включить/выключить. Всякий раз, когда захотите, вы можете нажать "refresh", чтобы обновить состояние всех выходов.
- На вкладке "Timers" вы можете установить любой из этих трех выходов для включения/выключения через определенный промежуток времени (от 0 до 24 часов).
- После любого действия вы получите сообщение с подтверждением о том, выполнилась ли команда успешно, или возникла какая-то ошибка.
Демонстрационное видео
Вот и всё! Надеюсь, статья оказалась полезной. Оставляйте комментарии!
Машинка на arduino и Bluetooth без редактирования кода. Мы будем использовать специализированный бесплатный софт для составления скетча. Кроме того не надо покупать шасси для нашей поделки, подойдет практически любая неисправная радиоуправляемая модель автомобиля или танка.
Предлагаю посмотреть обзорный видеоролик про блютуз-управляемую машинку и ее начинку.
Итак, давайте разберем на живом примере как сделать своими руками дистанционно управляемую по bluetooth c android планшета или смартфона машинку. Статья, как ни странно, рассчитана на начальный уровень знаний. Здесь нет руководства по редактированию кода в Arduino IDE, да и мы использовать его будем только для заливки нашего кода. А составлять алгоритм управления будем в программе под названием FLProg. Программа управления со смартфона — HmiKaskada_free. Но сначала о железе, которое нам понадобится.
Машинка на arduino и Bluetooth — аппаратная часть.
Первое что необходимо это шасси , то есть корпус с колесами и моторчиками, который и будет ездить на радость нам и окружающим. В моем случае был использован корпус от радиоуправляемой игрушки в которой выгорела силовая часть. Перспектива ремонта мне показалась унылой, да и хотелось чего то нового для своих детей. Так и родился этот проект. В корпусе стоят два двигателя которые приводят в движение колеса по бортам машинки, как у танка. Вся электронная начинка отправилась на запчасти.
Для управления электродвигателями нашего будущего творения понадобится Н-мост на микросхеме L298N Ссылка на Али, я брал у именно этот. Картинка кликабельна.
Н-мост для arduino
Может управлять двумя двигателями в диапазоне напряжений 5 — 35 вольт. Поддерживает ШИМ, то есть можно регулировать обороты двигателей. На плате есть вывод стабилизированного напряжения 5 вольт для питания ардуино.
Схема подключения проста и незатейлива:

Следующей неотъемлемой частью электронной начинки нашего проекта является bluetooth модуль HC-06 . Самый обычный модуль для ардуино, настолько популярен что в дополнительном описании не нуждается.

HC-06 bluetooth for arduino
Основным элементом и мозгом в моем случае выступает arduino nano , тут даже фото выкладывать не буду ибо все о ней знают и умеют с ней работать. Кстати подойдет любая плата ардуино, лишь бы в корпус поместилась 😀
Аккумуляторы и провода для пайки в определении спецификации не нуждаются. Выбор аккумуляторов зависит от рабочего напряжения электродвигателей.
Машинка на arduino и Bluetooth — составление скетча.
Повторюсь — никакого копания в коде тут не будет. Мы будем использовать популярную программу FLProg. Скачать ее последнюю версию можно на официальном сайте . Интерфейс проги прост и незатейлив, но имеется огромный функционал и поддержка практически всех популярных модулей. Как ей пользоваться писать не буду так как это потянет на пару статей. Скажу только что я не встречал более удобной и доступной программы для составления скетчей для arduino и ее клонов. Скрин интерфейса:

Интерфейс FLProg
На сайте полно текстовых и видео мануалов, думаю разберетесь.
Мой проект для дистанционно-управляемой машины можно скачать с яндекс-диска через сервис сокращения ссылок.
Машинка на arduino и Bluetooth — интерфейс управления на планшете android.
По многочисленным просьбам написал подробную инструкцию по разработке интерфейса управления на базе HmiKaskada android в статье . Ссылка кликабельна.
Для устройств под управлением android существует программа HmiKaskada (ссылка на ЯндексДиск) . Изначально она разрабатывалась как альтернатива дорогим промышленным HMI панелям. Но пытливые умы быстро смекнули что управлять она может чем угодно. В нашем случае машинкой. Поддерживает беспроводные интерфейсы Wi-Fi и Bluetooth, кроме того можно девайс подключить напрямую через USB.
Есть платная и бесплатная версии программы. У меня есть обе но я принципиально сделал проект в бесплатной версии что бы показать вам и в очередной раз убедиться в абсолютной работоспособности free версии. Основное отличие free от PRO версий это работа только по блютуз.
На форуме FLProg есть гигантская ветка по вопросу совместимости с КаСкадой, да и разработчик активен и общителен. Скрин панели управления выкладывать не вижу смысла — он есть в видеоролике.